Настройка регуляторов давления
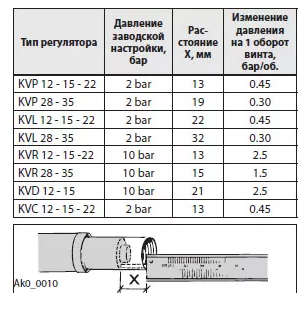
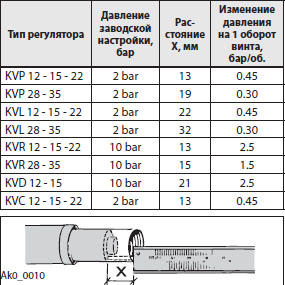
Регуляторы давления KV должно быть адаптировано в зависимости от установки настройки . Для определения заводской настройку Для каждого сорта регулятора регулировка основана на расстоянии от среза гильзы до головки регулировочного винта, что показано на рисунке.
Ниже приведена таблица, из которой вы можете найти показатель давления Соответствует заводу настройке А также при одном полном обороте он изменится на какую величину? регулятора . В средней колонке указано расстояние от головки до рукава.
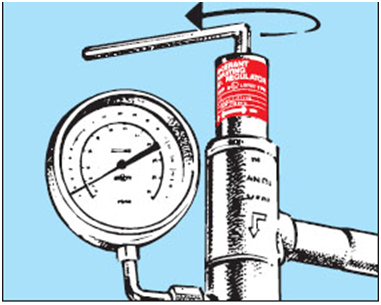
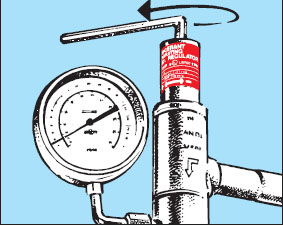
Регулятор давления кипения KVPs и его настройка
Стандарт в отличном состоянии давление Инструмент регулировки KVP установлен на 2 бара. Он растет давление поворотом винта регулятора вправо, а опускание этого индикатора — влево.
Проведя настройку инструменту дают поработать некоторое время, после чего производится точная настройка.
Регулировка производится с помощью манометра для точного определения давления внутри системы.
Обязательно наденьте крышку после этой процедуры, чтобы предотвратить замерзание.
Если при помощи регулятора KVP Вы хотите разморозить испаритель, тогда микрорегулировки следует проводить при температуре, которая оказывает минимальную нагрузку на всю систему.
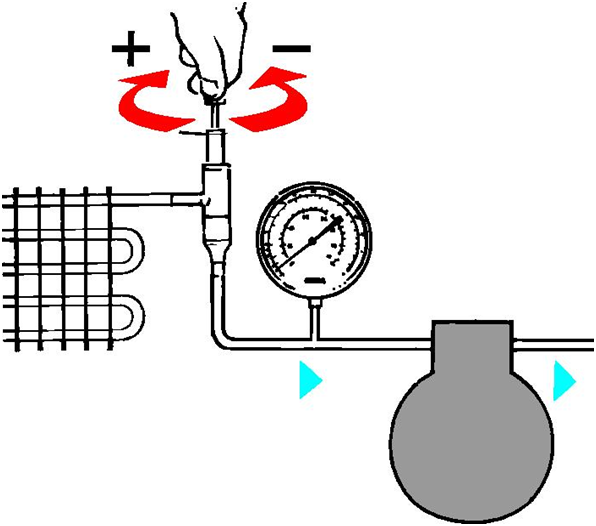
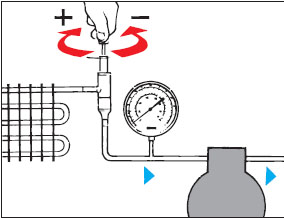
Настройка регуляторов давления KVL в картере компрессора
Как и в предыдущем случае, для регулятора КВЛ — это стандарт давление На двух планках. Рост и снижение показателей давление Поворачивая винт регулятора Справа или слева.
При работе с регулятором В типе KVL также используются манометры. Для этой операции он устанавливается на линии всасывания компрессора.
Заводская настройка регулятора имеет показатели давления Плотно закрытый клапан или в тот момент, когда он начинает открываться. Для защиты компрессора от повреждений, настройку Максимально допустимый давлении при всасывании.
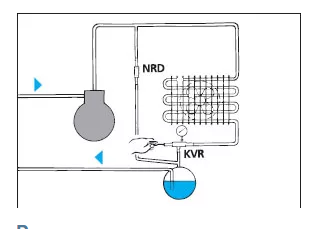
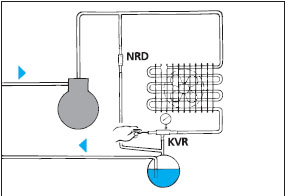
Регулятор давления Компрессия KVR + обратный клапан NRD
Предоставить права давление Выполняется в ресивере холодильного агрегата настройку KVR.
Это делается, если холодильник оснащен регуляторами КВР и НРД. НРД вызывает зазор обратного клапана давления Между конденсатором и приемником. Его значение колеблется от 1,4 до 3 раз, в то время как индикатор. давления В приемнике меньше, чем в конденсаторе.
В некоторых случаях эта разница просто неприемлема. Если вы окажетесь в такой ситуации, используйте клапан вместо НРД. давления KVD.
Обратите внимание, что корректировки лучше давления осенью или зимой, когда становится холодно.
Регулятор давления Конденсатор KVR в комбинации с регулятором KVD
Если в имеющемся холодильном агрегате регуляторы KVR + KVD, то вы должны следовать строгой последовательности, если их настройке . Сначала вы должны закрыть регулятор От. VR. D. Для этого винта регулятора Повернитесь до упора влево. Только тогда, выкручивая регулятора KVR получает то, что хочет давление конденсации.
Второй шаг — настройка регулятора KVD, что делается с помощью манометра. Давление в баке необходимо изменить, чтобы добиться такого показателя, чтобы оно было ниже, например, на 1 бар, чем в конденсаторе.
Эту процедуру также следует выполнять в холодную погоду. Если вам нужно провести калибровку до наступления холодов, есть два варианта.
Первый способ актуален, если установлен только один холодильник. Для точки отчета в такой ситуации возьмите давление До 10 бар, что является базовым для завода. настройки . Используя информацию из этой таблицы, выполните несколько оборотов винта регулятора Чтобы установить правильный давление .
Второй вариант — холодильные установки, которые продолжают функционировать. В этой ситуации мы не знаем. настройки Где регулирующими клапанами являются KVR и KVD. Поэтому вы используете манометр, с помощью которого можно определить базовое значение давление На основании чего вы будете производить настройку .
Настройка ПИД регулятора
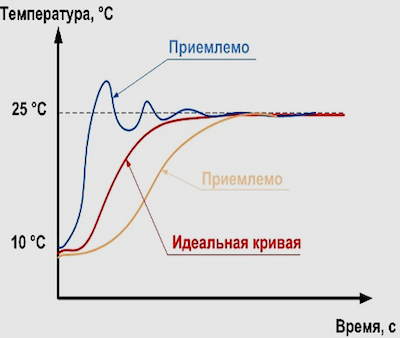
1. Перевести регулятор В ручном режиме дождитесь стабилизации процесса и внесите одно изменение в выходной сигнал (доступ к клапану) x, которое обеспечивает приемлемый отклик от переменной технологического процесса Y (рис. 1). 2. после получения ответа вернуться к исходному значению параметра выходного сигнала регулятора । Переменная технологического процесса также должна вернуться к исходному значению. Если разница значительна, повторите эксперимент с ответом. 3. определить коэффициент временных постоянных с коэффициентом усиления процесса (kp = y/x), время задержки D и вклад значений верхнего и нижнего отклика. 4. рассчитать коэффициент настройки ПИД регулятора в соответствии с формулами, приведенными в таблице 1 5. 5. для более постоянной работы регулятора Возможно, потребуется увеличить временную константу замкнутого контура (e).
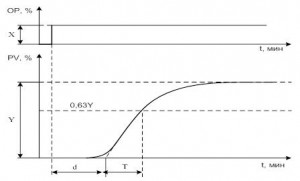
Рисунок 1. Реакция процесса на ступенчатый эффект.
alt=»Reg2″ width=»521″ height=»127″/>Таблица 1. Формула для расчета коэффициентов ПИД регуляторов
Где: x — значение изменения начального воздействия (в %); Y — значение изменения изменяемого процесса (в % от шкалы); KP — коэффициент усиления процесса; D — время задержки реакции процесса (в минутах); T — временная постоянная процесса (в минутах); E — временная постоянная замкнутого Минимально возможное время, в течение которого регулируется регулятор Из этого можно вывести значение переменной процесса для данной задачи.
Kp = j/x e = t+d
Для более постоянной работы регулятора Необходимо повысить ценность E. При настройке каскадных регуляторов , первый управляемый регулятор , затем ведущий регулятор । Кроме того, временный непрерывный носитель E. регулятора Временная постоянная e должна быть довольно нормальной регулятора минимум в 5 раз.
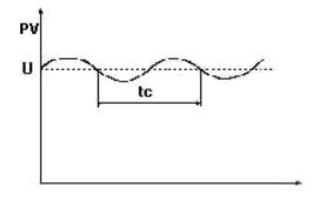
Настройка ПИД регулятора В соответствии с максимальным коэффициентом усиления (метод № 2).
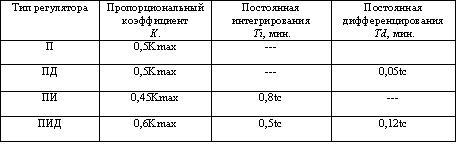
1. Переключите регулятор В ручном режиме, когда процесс достаточно стабилен и от установки не ожидается сильного отклонения от заданного режима. Установите TD (непрерывная дифференциация регулятора ) И k (коэффициент пропорциональности) регулятора ) в значении, равном нулю, и Ti (непрерывная интеграция регулятора ) Для максимального значения. 2. если вам понадобится вернуться к этой процедуре, запомните исходное положение клапана. настройки . Переключите регулятор В автоматическом режиме. 3. постепенно увеличивайте значение коэффициента пропорциональности, пока не начнутся колебания. Важно обеспечить, чтобы колебания происходили с постоянной амплитудой. При увеличении амплитуды колебаний коэффициент пропорциональности должен уменьшаться. При сильном скоплении необходимо перевести регулятор В ручном режиме установите значение для выхода из клапана, пропущенного ране в пункте 2, уменьшите коэффициент пропорциональности и повторите усилие. Если происходят те же колебания, измерьте период колебаний ТС (время работы полного цикла) (см. рисунок 2). Полученный коэффициент пропорциональности является максимальным для данной системы управления (KMAX). 4. Рассчитайте коэффициент после TC и KMX. настройки ПИД регулятора в соответствии с формулами, приведенными в таблице 2.
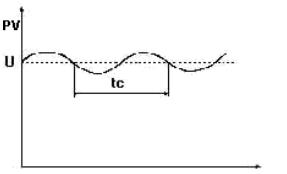
Рисунок 2. Определение продолжительности колебаний
alt=»Рег4″ width=»578″ height=»182″/>Таблица 2. формула для расчета коэффициентов ПИД регуляторов
Общие правила для настройки регуляторов : Контроллер не работает нормально, когда клапан почти полностью закрыт или почти полностью открыт. Мелоди регулятор Это необходимо в той области баланса, где ему, возможно, придется работать. Эффект дифференциального компонента не должен использоваться для регуляторов потребление. Не следует использовать малые значения интегральной составляющей в регуляторах Уровень. Эффект дифференциального компонента не должен использоваться. в регуляторах уровня. После настройки регулятора Необходимо проверить его устойчивость, изменяя значение функции на критическое значение. Если наблюдается накопление, необходимо уменьшить коэффициент усиления. Следует помнить, что безопасным для стабильности регулятора , Имеются большие значения Ti и малые значения Td. Для результатов измерения шума обычно невозможно использовать дифференциальный член. Никогда не делайте дифференциальный член больше, чем член интегрирования. При настройке каскадных регуляторов Ведущее время интеграции регулятора Должно быть в 4 раза больше, чем время интеграции ведомого устройства. регулятора . Примечание: После настройки регулятора В соответствии с методом 1 или методом 2, для более точной работы регулятора Вы можете настроить коэффициенты в соответствии с рисунком 3.
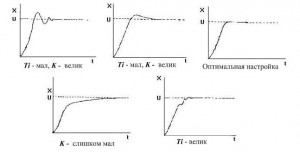
Рисунок 3. График для пояснения настройки регулятора .
С дополнительными ингредиентами по настройке ПИД регуляторов Вы можете проверить здесь.
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете здесь.
Для закрепления полученных знаний мы рекомендуем вам воспользоваться программой для моделирования контуров управления
Настройка регуляторов давления
В таблице указано давление заводской настройки для регуляторов X каждого типа и расстояния для головки регулировочного винта. это давление Совпадения, а также изменения давления настройки Поверните винт на один полный оборот.
Настройка регуляторов давления кипения типа KVPs
Если регулятор KVP используется для оттаивания испарителя, тонкая настройка выполняется с минимальной тепловой нагрузкой на систему. После каждой регулировки не забывайте устанавливать защитный колпачок на регулировочную втулку.
Настройка регуляторов давления KVL в картере компрессора
Заводская настройка регулятора соответствует давлению Где клапан начинает открываться или давлению Там, где она полностью закрыта. Для защиты компрессора, регулятор Должно быть установлено максимально допустимое значение давление Всасывание компрессора.
Эту настройку Должно соответствовать показаниям манометра, установленного на линии всасывания компрессора.
Регулятор давления Компрессия KVR + обратный клапан NRD
Давление конденсатора обычно составляет 1,43,0 бар (дифференциальное.) Прохождение давления На клапане НРД) в верхней части давления В приемнике. Если эта разница неприемлема, используйте регулятор KVR с клапаном KVD давления в ресивере.
Настройку регуляторов Желателен перенос в холодную погоду.
Регулятор давления конденсации KVR + регулятор KVD
Затем регулятор KVD настраивается на давление В приемнике, например, для давление Приемник имел примерно в 1 раз меньше давления испарение. Это настройка Выполняется с помощью манометров. Рекомендуется корректировка в холодную погоду.
Методы настройки промышленных регуляторов
Параметры настройки регуляторов Следует выбирать так, чтобы обеспечивался запас устойчивости, заданный в замкнутой системе автоматического управления (САУ); В то же время выбранный показатель качества управления не должен быть хуже необходимого (или иметь избыточное значение).
Поскольку в теории автоматического управления пределы устойчивости могут быть оценены различными способами и используются различные показатели качества управления, для определения оптимальных параметров в инженерных расчетах применяются различные методы. настройки регуляторов .
Ниже приведены наиболее распространенные из них.
Формула метода для определения настроек регулятора
В практике ввода в эксплуатацию для определения оптимальных параметров часто используются приближенные формулы настройки регуляторов . Метод используется для быстрой, приблизительной оценки значений параметров настройки регулятора Для оптимального специфического контроля используются процедуры трех типов. Метод применим как к статическим объектам с самовыравниванием (табл. 1), так и к объектам без самовыравнивания (табл. 2).
Таблица 1 Метод формулы для определения корректировки регулятора Для стационарных объектов с самовыравниванием.
| Регулятор | Конкретный процесс регулирования | |
| Anamnesis | С 20% перерегулированием | JМин |
| И | ||
| П | ||
| ПИ | ||
| PID |
Где T,. Тау.оу— Постоянная времени, задержка и коэффициент усиления объекта. Эти формулы предполагают, что вы настроили регулятор С зависимыми параметрами, имеющими передаточную функцию:
Гдеp– край регулятора ;
Tи– продолжение интеграции регулятора ;
Tд– константы дифференциации.
Таблица 2 – формульный метод определения настроек. регулятора Для неподвижных объектов без самовыравнивания.
| Регулятор | Конкретный процесс регулирования |
| Anamnesis | С 20% перерегулированием |
| П | — |
| ПИ | |
| PID |
Оптимальная настройка регуляторов по номограммам
В отличие от метода формул, именованный метод расчета позволяет более точно определить настройки регулятора Поэтому учитывается наличие нелинейной зависимости между параметрами настройки регулятора И пропорции . tau. Значение
Имеются намограммы для расчета Pi и настроек PID. регуляторов Для отложенных позиций первого и второго порядка
Номограмма для параметров Pi регулятора Показано на рисунке 12
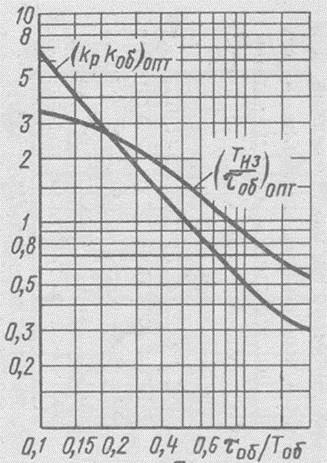
Рис 12 &⑥; Намограмма для расчета параметров Pi. регулятора .
Предположим, что объект управления описывается связью первого порядка с запаздыванием, а оптимальный процесс управления представляет собой процесс с 20% перебором. Следует учитывать, что современная электроника и микропроцессоры. регуляторы Реализовать Pi и PID законы управления с зависимыми настройками и пневматикой. регуляторы * с независимыми настройками сцен
Дифференциальная составляющая отрасли регуляторов Обычно применяется в форме
Гдеpд– край регулятора По дифференциальному компоненту (выбранному в категории 1&⑥; 10);
Эти параметры определяются соотношением
Чем выше уровень шума в выходном сигнале объекта, тем ниже⑦. Рекомендуется использовать значениеpд. Это поможет уменьшить значение среднеквадратичной ошибки управления
Рассчитайте настройки в соответствии с частотными характеристиками объекта.
Специальное устройство для экспериментального определения амплитудно-фазовых характеристик АЧХ объекта управления Эта функция может быть использована для расчета ⑦ настроек регулятора , где основным критерием является обеспечение заданного в системе запаса устойчивости.
Полезно характеризовать запас устойчивости индексом вибрации системы m, значение которого находится в системе ПИ- регулятором Соответствует максимальной амплитудно-частотной характеристике замкнутой системы Чтобы этот максимум не превышал заданного значения, АЧХ разомкнутой системы не должна переходить в круг с центром P0и радиус⑦, где
Можно показать, что оптимальными настройками с точки зрения минимальной среднеквадратичной ошибки управления являются те, при которых индекс вибрации системы⑦&⑦; mзБудет наибольшим коэффициентом на интегральную составляющую, которая составляет⑦. Соответствует положениюp / Tи& ⑦ ; по крайней мере.
В этом отношении расчет оптимальных настроек состоит из двух этапов:
1. ① Находитесь в плоскости параметров.pИ ТиГраницы диапазона, в котором находится данный колебательный индекс системы⑦. Этоз .
2. путем определения точки на границе поля, которая удовлетворяет ⑦.p / Tи& ⑦ ; по крайней мере.
Указание метода расчета ПИ регулятора по АФХ объекта
1. k. Создано семейство размерных фазовых свойств открытой системы дляp= 1 и⑦. Различные значенияij(5-6 значений.)
2. задать значение индекса вибрации m из диапазона 1,55&⑦; m&Le; 2,3 (рекомендуется m = 1,6 ⑦ Провести прямую линию под углом от исходной точки
Где Мз— Выбранное значение индекса вибрации
3. AFC создала семью касательных0j⑦ непосредственно на угол Beta , А центр окружностей всегда находится на отрицательной действительной оси по замыслу, радиус этих окружностей ⑦.j .
4. ⑦ пределов для каждого круга . Рассчитатьp .
5. из значенийpjИijПостроить границу поля заданного индекса колебаний.
6. на этом пределе определяется точка, для которой отношение ⑦.p / TиМаксимум
Существует простой метод настройки ПИ- регулятора С точки зрения АФК открытой системы, метод основан на следующем факте В результате экспериментов и численных расчетов было установлено, что для различных типов объектов управления существует оптимально настроенная ⑦. регуляторе АЧХ открытой системы проходит через точку, расположенную приблизительно вдоль амплитудыp= 0,8, фаза и фи;p= — 2,62 рад = — 150 & град; а частота и омега;p.
Экспериментальные методы настройки регулятора
Для значительного числа функций промышленного управления не существует точных математических моделей, описывающих их статические и динамические свойства. В то же время проведение экспериментов по устранению этих свойств очень дорого и утомительно. Экспериментальный метод настройки регуляторов Знание математических моделей объекта не требуется. Однако, если предположить, что система смонтирована и ее можно заставить работать, а также, вероятно, изменить настройки регулятора .
Таким образом, вы можете провести несколько экспериментов, чтобы проанализировать влияние изменений настроек на динамику системы. В конечном итоге, хорошие настройки для этой системы управления гарантированы. Есть две возможности настройки — Метод угрожающих колебаний (метод Циглера и Николиса) и метод затухающих колебаний.
Метод угрожающей вибрации
В рабочей системе интегральная и дифференциальная составляющие замкнуты регулятора ( Tи= & infin;, tд= 0), т.е. система переводится в состояние управления P. Последовательное увеличение на kpПри одновременной подаче малого судорожного сигнала, действиями достигается явление в системе зловещих колебаний с периодамиkp। Это соответствует устранению системы с точки зрения устойчивости осциллятора.
При наступлении этого режима регистрируются значения критического коэффициента армирования регулятора KkpА длительность значительных колебаний в системе tkp। При возникновении значительных колебаний ни одна из переменных системы не должна достигать уровня ограничения. В соответствии со значениями kkpИ ТkpПараметры рассчитываются настройки регулятора :
Расчет настроек регулятора Может быть изготовлен в соответствии с критической частотой объекта управления и омега;kp। При условии, что у него есть частота и омега;kpОбъект управления совпадает с критической частотой колебаний в замкнутой системе регулятором , величины KkpИ ТkpМожно определить по длительности значительных колебаний амплитуды и объекта контроля.
Когда замкнутая система доводится до предела устойчивости осциллятора, амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на предприятии или выпуску бракованной продукции. Поэтому не все системы управления производством могут быть указаны для критического режима работы.
Метод затухающей вибрации
Этот метод позволяет настроить регуляторы Без перевода системы в критический режим работы. Как и в предыдущем методе для закрытой системы с регулятором , последовательное увеличение на kpВы добиваетесь обработки перехода прямолинейного импульса по знаку задания или затвердевания с перепадом затухания d = 1/4.
Более того, эти осцилляции определяют продолжительность TкИ ценность непрерывной интеграции и дифференциации регуляторов TиИ Тд
После установки расчетных значений tиИ Тд на регуляторе Необходимо экспериментально уточнить значение kpДля получения уменьшения демпфирования d = 1/4. Для этого производятся дополнительные корректировкиpДля выбранного закона регулирования, который обычно приводит к уменьшению kp20 и делится; тридцать процентов. Аналогичный метод настройки Используется в адаптивных регуляторах Американская компания Foxboro.
Большинство промышленных систем управления качественно настроены, когда деградация их демпфирования D составляет 1/4 или 1/5.
В настоящее время разрабатывается новый метод настройки Система управления с замкнутым контуром, основанная на подаче на вход синусоидальных испытательных колебаний. регулятора । В соответствии с амплитудой и фазой выходного сигнала объекта управления рассчитываются настройки регулятора Исходя из заданного показателя колебаний М и условия обеспечения максимального показателя отношения.p / Tи .
Настройка ПИД регулятора
Пид- регуляторы Предназначен для управления различными процессами пропорционально, интегрально и дифференцированно. Именно так стала называться аббревиатура этих устройств. Справа настройка ПИД- регулятора Позволяет быстро достичь требуемых параметров для всей системы. Сигнал, поступающий от любого объекта, определенным образом преобразуется в устройстве контроллера, затем возвращается и влияет на управление этим объектом.
Зачем настраивать pid-. регулятор
Наиболее типичным примером использования этих устройств являются тепловые системы, предполагающие изменение или поддержание на определенном уровне различных температур. Тонкие настройки позволяют снизить потери энергии при охлаждении или нагреве. Специфические модификации ПИД- регуляторов Они выбираются в соответствии с индивидуальными характеристиками конкретной тепловой системы.
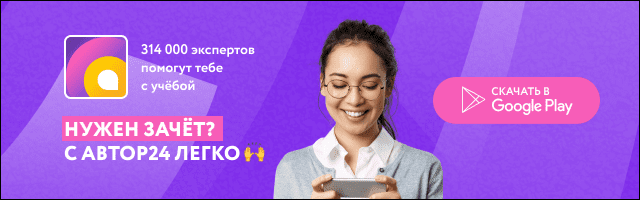
Рекомендуется рассмотреть необходимость тонких регулировок на примере отопительных приборов. Управление этим нагревателем осуществляется с помощью ПИД-регулятора. регулятором И я должен поддерживать заданную температуру. Уровень температуры измеряется и контролируется термопарой. Конечной целью настройки является выбор наиболее оптимального коэффициента, поддерживающего заданный температурный режим. На представленных диаграммах видны попытки повысить температуру от 10 до 25 градусов. В этом случае возможны несколько вариантов. Общим звеном для них является регулятора В результате его работа осуществляется в контролируемом энергетическом режиме, а микроклимат в помещении достигает желаемого уровня.
Идеальный ход температурной кривой показан красным цветом (рис. 1). То есть, этот физический параметр легко приводит в движение заданную марку за наименьшее время. Оптимальный период довольно сложно определить, так как на него влияют такие факторы, как мощность обогрева, размер помещения и т.д. Это значение определяется экспериментально.
2. 
Черный цвет указывает на неправильный выбор коэффициентов при регулировании температурного графика. Работа системы становится нестабильной, регулятор Он работает неравномерно, и определенное значение не поддерживается.
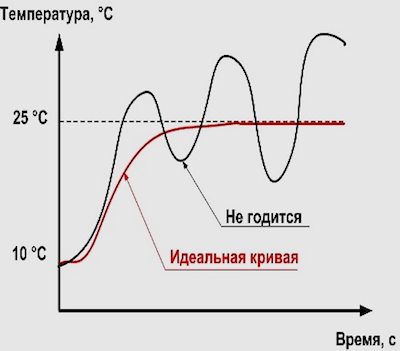
При более благоприятных условиях температурные кривые все еще далеки от стандартных значений (рис. 2). Черная кривая показывает резкие скачки относительно требуемого значения, а зеленая — плавную, но очень медленную корректировку.
3. 
Наиболее приемлемые варианты всех трех кривых приведены на рисунке 3. Идеальный температурный график, обозначенный красным цветом, возможен только теоретически. На практике производится длительный отбор коэффициентов, допускающий только близкие значения, пригодные для использования. То есть, согласно приведенным графикам, температура 25 С достигается в среднем за 15-20 минут с максимальным скачком в 2 градуса.
Выбор необходимого коэффициента, расчет и настройка Может производиться различными методами.
Метод настройки по отклику
Данная методика настройки регулятора Предлагает следующую процедуру:
- Перед настройкой регулятор , он установлен в режиме ручного управления. Затем необходимо дождаться стабилизации процесса и изменить выходной сигнал X, как только появится регулировочный клапан. По этой причине можно получить наиболее приемлемый отклик переменной y, которая отвечает за технологический процесс. Это регулируемое значение, которое влияет на ход общих настроек.
- После получения ответа параметр выходного сигнала регулятора Возвращается в исходное положение. Переменная технологического процесса попадает в ту же ситуацию. В норме разница между этими двумя показателями должна быть незначительной. Если разница очень значительна, попытку ответа необходимо повторить.
- Далее определяется значение коэффициента увеличения процесса по формуле kr = y/x, а также временная постоянная t и время задержки D. Для этого верхняя и нижняя реакции берутся по средним значениям.
- Расчет параметров ПИД-регулятора регулятора Настройка включается по специальной формуле: k = 2T + d/kr (2e + d). Он рассчитывает коэффициент пропорциональности. Непрерывная интеграция снова определяется по формуле: ti = t + d/2, а непрерывная дифференциация — td = t/(2T + d). Здесь КР — коэффициент интенсификации процесса, D — время задержки реакции процесса (мин), T — временная постоянная процесса (мин), E — временная постоянная замкнутого контура (мин).
- Минимально возможный период времени, за который процесс доводится до определенного, рассчитывается по формулам кр = y / x и e = t + D для работы регулятора Следует увеличить более стабильную, временную константу e.
Если используется каскад регуляторы , то сначала необходимо настроить светодиод регулятор А потом — ведущий. Разница между температурной константой ведущего и светодиода. регуляторов Очень важно. У первого почти в 5 раз больше, чем у второго.
Метод с максимальным коэффициентом усиления
В этом случае настройка ПИД- регулятора Это делается в определенном порядке:
Органы настройки регулятора
Отрасль науки и техники, занимающаяся вопросами производства, преобразования, распределения и использования электрической энергии, называется электротехникой.
Для производства электроэнергии необходимы мощные турбины и электрогенераторы. Они создаются на предприятиях электротехнической промышленности. На этих же предприятиях производятся электродвигатели, электронагреватели и приборы, осветительное оборудование, электротехническое оборудование и т.д. Устройства, в которых электрическая энергия преобразуется в механическую и другие виды энергии. Для передачи электроэнергии на большие расстояния, будь то между потребителями, заводами, шахтами, строительными площадками, жилыми домами и т.д. — Построить подстанции, построить линии электропередач.
В целом отрасль народного хозяйства, задачей которой является обеспечение быстрого развития производства электроэнергии, называется электроэнергетикой. В настоящее время ведется много работ, строятся новые тепловые, в том числе атомные и гидроэлектростанции, создаются энергетические системы. Энергетическая система (энергосистема) — это непрерывность работы электростанций, подстанций, линий электропередачи, совокупности присоединенных тепловых сетей в едином общем режиме, а также производство и распределение электроэнергии, энергии и тепла.
Электричество прочно вошло в экономику и жизнь страны. Знать основы электротехники необходимо каждому человеку: рабочему, инженеру, врачу и сельскому жителю. Для службы в армии требуется знание электротехники.
Электротехнические профессии и специальности широко распространены на предприятиях народного хозяйства Электротехника включает сборку, монтаж, эксплуатацию и ремонт электроустановок Монтажные работы выполняются в основном на заводах электротехнической промышленности Наиболее распространены здесь профессии электромашинистов (аппаратчик, аппаратчик, трансформаторщик и т.д.).
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Монтажные работы выполняются слесарями, электромонтерами и электромонтерами различных специальностей на строительных площадках, на транспорте, при строительстве электрических сетей, на предприятиях любого профиля, в сельском хозяйстве, во всех учреждениях, для которых характерны эксплуатационные и ремонтные работы Электроремонтные помещения, дежурные электромонтеры, электрооборудование для эксплуатации промышленного электрооборудования
Энергия — ключевой аспект жизни человечества Развитие энергетики было и остается одним из сильнейших факторов развития промышленного потенциала и условий жизни всего человечества На начальном этапе развития энергетики — службы одной из главных задач было руководство производством и приемкой энергетического оборудования
С пуском в ноябре 1964 года первой очереди завода перед энергетиками была поставлена важнейшая задача — бесперебойное обеспечение наземного производства всеми видами энергоресурсов тепло- и водоснабжения, шламовых хозяйств, компрессорных и кислородных станций, мазутных и многокилометровых сетей трубопроводов и линий электропередач, ГПП и нескольких подстанций, целых систем радио — и телефонной связи, всего того, что стало жизнью и движением технического оборудования завода, постоянным контролем энергетиков стало главной задачей предприятия
1996 год стал новой вехой в истории энергослужбы предприятия В тот год в энергослужбу станции влился большой коллектив Павлодарской ТЭЦ-1 С тех пор мы обеспечиваем производство собственной тепловой и электрической энергией Произведенная продукция не только полностью обеспечивает производство, но и поставляется сторонним потребителям для коммунальных нужд города По системам линий электропередачи и распределительным цепям распределительных станций электроэнергия транспортируется и распределяется потребителям по трубопроводам и насосным станциям в соответствии с заданными режимами и параметрами — это основная функция электричества и энергии
В настоящее время в энергосервисной службе АО «Казахстанский алюминий» работает более 2200 человек, все усилия направлены на обеспечение высокой надежности качества продукции и предоставление энергии для ее эффективного и безопасного использования
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Пояснительная часть
Для того чтобы обеспечить нормальное функционирование технологических процессов в различных отраслях промышленности, поддерживают или изменяют заданные законы для таких овощей, как температура, давление , расход, уровень заполнения и т.д., используйте автоматический регуляторы И полностью автоматическая система управления (управление
Автоматический регулятор — Это совокупность устройств, подключенных к объекту управления для автоматического поддержания при определенном значении регулируемой (выходной) величины объекта
Автоматические регуляторы В общем случае, промышленное назначение преобразует сигнал рассогласования (разность между сигналом, обозначающим определенное значение, и текущим значением регулируемой величины) в регулирующее воздействие по нормативным законам сигнала
Являются ли автоматическими регуляторы Прямое действие без вспомогательных источников энергии, и регуляторы Косвенные меры с использованием энергии внешних источников В зависимости от типа источника энергии и основной сигнальной среды. регуляторы Косвенные меры делятся на электрические, пневматические, гидравлические и смешанные (электрогидравлические или электропневматические) меры
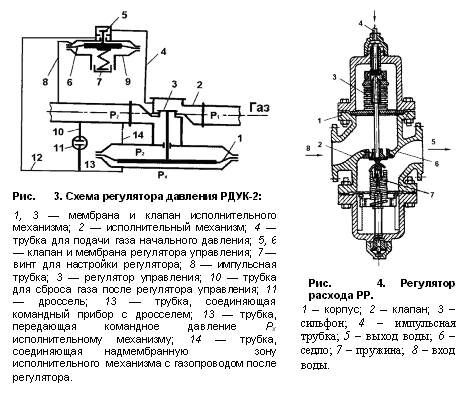
Регулятор температуры RT (рис. 1) имеет регулирующий клапан 1 и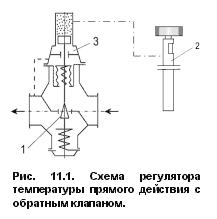 Герметичная тепловая система, состоящая из термобелья с узлом настройки 2 и исполнительный 3. допустимый давление Среда, в которую помещен термобеллан, составляет 1,6 МПА Во время контроля температуры расход теплоносителя приостанавливается регуляторы С прямым клапаном охлаждающая среда с обратным клапаном
Герметичная тепловая система, состоящая из термобелья с узлом настройки 2 и исполнительный 3. допустимый давление Среда, в которую помещен термобеллан, составляет 1,6 МПА Во время контроля температуры расход теплоносителя приостанавливается регуляторы С прямым клапаном охлаждающая среда с обратным клапаном
Прямые регуляторы применяют простейшие законы управления и используются для автоматизации простых объектов с небольшим количеством регулируемых переменных, не повышающих требования к качеству систем управления (котлы малой мощности, теплообменники индивидуальных и центральных тепловых пунктов, газовые, газосмесительные станции, отопительные печи и т.д.).
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Эти регуляторы Используется для автоматической стабилизации температуры, давления и перепада давлений , расход газообразных и жидких сред и уровень жидких сред.
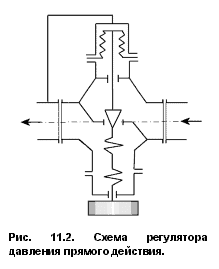
Регуляторы давления Прямое действие используется для автоматического поддержания определенного значения давления Регулятор для воды, пара, газа, нефтепродуктов. давления ⑦-32 имеет пределы регулирования 25 — 100 и 63 — 250⑦, диаметр условного прохода 32 мм, температура регулируемой среды 0 — 200 оС, давление до 1,6 МПа.
Регулятор давления ⑦ — Рассчитывается прямое действие типа 2 на давление
 давление газа на входе до 1,2 МПА и на выходе от 0,5 до 600 КПА Состоит из регулирующего клапана с различными диапазонами седла, мембранного привода, регулятора управление, дроссельная заслонка и соединительные трубы.
давление газа на входе до 1,2 МПА и на выходе от 0,5 до 600 КПА Состоит из регулирующего клапана с различными диапазонами седла, мембранного привода, регулятора управление, дроссельная заслонка и соединительные трубы.
Регуляторы давления Прямое действие (рис. 2) используется для автоматического поддержания определенной величины давления Вода, пар, газ, нефтепродукты
Регулятор давления ⑦ — Рассчитывается прямое действие типа 2 на давление газа на входе до 1,2 МПА и на выходе от 0,5 до 600 КПА Состоит из регулирующего клапана с различными диапазонами седла, мембранного привода, регулятора управления, дроссельной заслонки и соединительных трубопроводов План регулятора давления ⑦ — 2 на рис.: 3
При изменении давлений В подающем и обратном трубопроводах тепловой сети по различным причинам (изменение расхода воды в тепловой сети, включение и отключение отдельных потребителей) происходят изменения давления На входе в здание, что приводит к изменению потока воды, поступающей в систему отопления, для поддержания постоянного зазора давления На входе в систему отопления (тем самым стабилизируя температуру в отапливаемых помещениях), регуляторы Стоимость ПП (рис. 4). стоимость
Контроллер потребления RR поддерживает постоянный дифференциал давления Регулируемый диапазон на (в центре) регулятором А место присоединения импульсной трубки К регулируемому диапазону должно иметь значительное гидравлическое сопротивление
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
В качестве регулируемой точки можно использовать сопло элеватора или специально установленную диафрагму
Давление воды прямое за регулятором , действуя снизу на плоскую поверхность клапана 2, стремится закрыть его, но это усилие сначала преодолевается усилием от действия давления Сильфон 3 снаружи, одинаковые давлению воды на крепление импульсной трубки 4 и, во-вторых, усилие выступающей пружины 7. Эти противоположные усилия уравновешиваются фиксированным ходом клапана, который обеспечивает перепад давления । Другими словами, на дифференциальном клапане имеется зазор. давлений , равная потере давления В регулируемом диапазоне усилий с этой разницей давлений , Клапан сцепления для седла 6, уравновешивается силой пружины при определенном ходе клапана
Регуляторы потребления РП также используются в качестве регулирующих органов регуляторов Косвенное потребление
Электрические регуляторы । Современная промышленность производит множество автоматических электронных регуляторов Разрешение на автоматизацию технологических процессов: Температура, давления , расход, уровень, влажность и т.д. Среди них наиболее распространенными системами автоматического управления являются. регуляторов Эти системы похожи
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
⑦ — 25 устройство ( & ⑦ ; кристалл &⑦;) имеет следующие основные элементы: Измерительный блок, электронный блок, датчик (регулируемый) измеряемой величины, ее отложение.
Обнаружение неисправностей блоков и элементов является сложной технической задачей Наиболее верным способом диагностики неисправности является оптимальный поиск проходных входных и выходных характеристик крупных блоков
Пневматический регулятор давления Тип ⑦ — 712 ⑦ используется для управления давлений газа и жидкостей в широком регулируемом диапазоне значений Устройство имеет измерительную и регулирующую части для регулятора Действуют следующие условия: представить измеренные давление ; подать давление воздух; подключить сформированный выход давление от регулятора Через исполнительный механизм контролировать процесс регулирования; рассчитываться с вкладчиком давления С помощью шкалы прибора задается требуемое значение регулируемого давления Установите коэффициент пропорциональности в диапазоне 20-40% и время в диапазоне 1-3 минут; регулятора Если регулируемые параметры отказываются от финала на несколько часов, то настройку .
Современная промышленность выпускает множество пневматических систем, включая составную интегрированную систему (Aus), upep, segra, которая позволяет контролировать и регулировать производственные процессы Эти системы построены по прямой аналогии с электронными, электронными и пневматическими системами регуляторами диапазона настроек.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Назначение подразделения
Электронный регулятор ⑦ — 25 ( & ⑦ ; кристалл&⑦;)
Автоматическая электроника регулятор Это позволяет автоматизировать технологические процессы: Температура, давление , капля газа или жидкости (потребление
⑦ — 25 устройство ( & ⑦ ; кристалл &⑦;) имеет следующие основные элементы: Измерительный блок, электронный блок, датчик (регулируемый) измеряемой величины, ее отложение.

| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Техническая информация
Питание агрегатов осуществляется от сети переменного тока с частотой 50 ❶ 1 Гц и напряжением 220 в сети
Ток, потребляемый от сети ⑥ 2.3, не превышает входного сопротивления 22: А) для сигнала 0-5 ма — не более 100 Ом; Б) для сигнала 0-20 ма — не более 25 Ом; В) для сигнала 0-10 В — не более 15 КОм.
Устройства выполняют следующие функции:
— Сумма сигналов, поступающих от передатчиков с естественными электрическими выходными сигналами. —
— Введение информации об указанном значении величины. —
— Формирование и усиление признаков несоответствия.
— Формирование при генерации электрических импульсов постоянного или переменного тока для управления исполнительным аппаратом с постоянной скоростью движения.
-Строительство с управлением постоянной скоростью привода Proportional-Integral-Law
— Формирование постоянной скорости дифференциала и привода с пропорционально-интегрально-дифференциальным законом управления
— Ручное управление приводом
— Дифференциальное преобразование сигнала от трансформаторного измерительного механизма в сигнал постоянного тока
Выходной сигнал:
A) Импульсы напряжения с непрерывным пульсирующим током со средним значением напряжения 24 В;
B)изменение положения бесконтактных кнопок, позволяющее переключать пульсирующий постоянный или переменный ток.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Описание устройства
⑦ — 25 блоков управления предназначены для использования в автоматизированных системах управления и контроля технологических процессов
Инструменты изготовлены в прямоугольном металлическом корпусе и предназначены для установки в шкаф управления Все органы управления блоком расположены на передней панели (рис. 6, A.) Блок подключается к цепи управления и питания через клеммную колодку на задней панели блока
Блок предназначен для подключения датчика из 1, 2 или 3 дифференциальных трансформаторных датчиков и датчика положения исполнительного механизма (IP)
Сигналы от вторичной обмотки датчика подаются на входы клемм 11-2, 3, 11-12, 13-14, 14-15, если используется сигнал датчика положения Мт, то он подается на клеммы 4-20 (рис. 6, А). затем этот сигнал передается на клемму
Можно подать на вход сигнал тока (1-0) или (5-0) ма (в этом случае вход должен быть соединен мостом на 11-12 клеммах с резисторами до 78,7 Ом или 19,6 Ом, или также сигнал (0-10) В для определенного входа (CL 14-16) только в качестве усиления
При подаче сигнала тока (0-5)⑦, (0-20)⑦ или сигнала напряжения (0-10) напряжение питания устройства должно быть стабилизировано, внутренний источник питания входной цепи не должен использоваться
Если в управлении используются не все входы устройства, их клеммы остаются свободными Первичная обмотка датчика дифференциального трансформатора работает с клеммами 3-19 устройства Первичные обмотки 2, 3 или 4 датчиков должны быть соединены последовательно
Если в цепи управления нет внешнего драйвера, клеммы 17-18 должны быть соединены перемычкой В этом случае предел внутренней уставки составляет ⑦ 20 При подключении внешнего драйвера ⑥ 11 к клеммам 17-20-18, перемычка снимается с клемм 17-18; Тогда диапазон внутренней уставки (как и подключенной внешней) составляет ⑥ 10%.
Внешний индикатор состояния подключается к клеммам 5-20
Клемма 20 является общей точкой цепи устройства.
Схема устройства позволяет использовать как внутренний источник, так и напряжение 24 В постоянного тока от внешнего источника питания для управления стартером (Рисунок 6, A). это обусловлено следующими факторами:
Выходное напряжение от внутреннего источника снимается с клемм 8-9 «вверху» и с клемм 8-7 «внизу».»
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Выходное напряжение от внутреннего источника снимается с клемм 8-9 «вверху» и с клемм 8-7 «внизу».»
Мощность, передаваемая в цепь нагрузки при работе от внутреннего источника 24 В, ограничена нагрузочной способностью трансформатора блока и не должна превышать 6 ВА.
Можно увеличить мощность, подаваемую на нагрузку, подключив к клемме 10 (минус блока) и средней точке нагрузки полноволновый выпрямленный источник неслышимого напряжения, среднее значение которого не превышает 250 В, при среднем значении потребляемого тока не более 1,5 А.
Блок позволяет использовать для управления пусковыми устройствами переменное напряжение 220 В от внешнего источника (сети). Фаза сети подается на клемму 10 устройства, а нейтраль подключается к центру катушки пускового устройства (рис. 6, вкл.).
Допускается подключение однофазных конденсаторных двигателей непосредственно к выходным клеммам 7, 9, 10 устройства, при условии, что мощность, потребляемая двигателем, не превышает 300 ВА для сбалансированных обмоток (u work = 250 В, I work = 1,5). A) например, серии PR и Dr, в этом случае фаза подключается к клемме 10, нейтраль — к общей точке обмотки, а резисторы 10 Ом и 2 Вт устанавливаются в цепи, ведущей к клеммам 7 и 9.
Клеммная колодка на задней панели устройства используется для подключения датчиков и исполнительных механизмов.
На задней стороне устройства имеется винт для подключения защитного заземления.
Блок питания с напряжением 220 В и частотой 50 Гц подключается к клеммам 1 / фаза / и 2 / нейтраль / на клеммной колодке блока.
Установка
1. устанавливайте устройство в местах, пригодных для обслуживания, эксплуатации и ремонта в соответствии с требованиями безопасности. 2. устройство должно быть установлено в соответствии с требованиями безопасности.
2. устройство должно быть надежно заземлено в соответствии с требованиями "ПУЭ". Сопротивление заземляющего устройства не должно превышать 4 Ом. 3.
3. соблюдайте правила и требования «ПУЭ», «ПТБ» при установке, регулировке и эксплуатации прибора. And" Pte & quot;, инструкции по технике безопасности, применяемые на предприятии-потребителе.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
4. не допускается установка устройства в особо опасных и рискованных зонах.
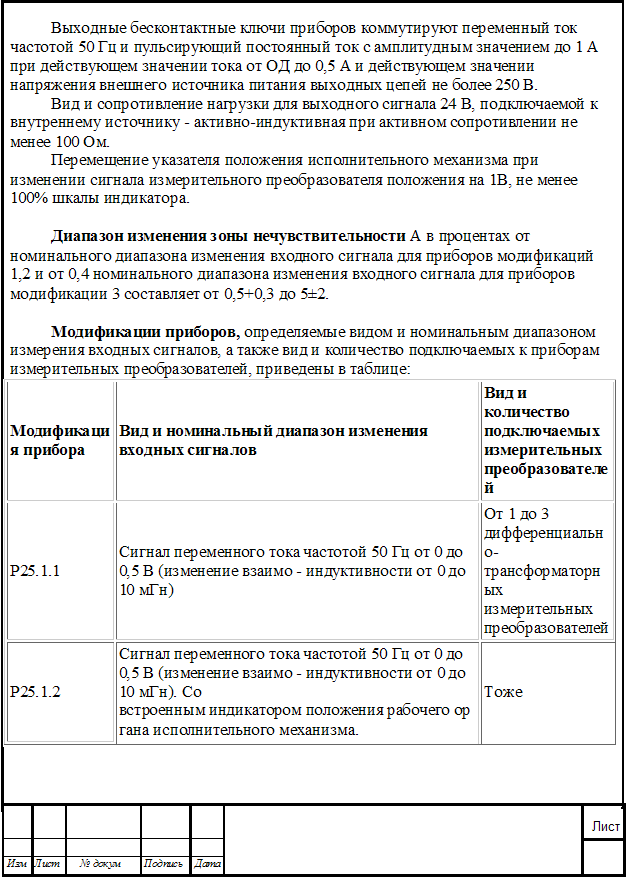
Включает следующие операции: подготовка прибора — подключение входных преобразователей и выходных устройств (или устройств, их заменяющих), блока управления; подключение и подача питания; определение функционирования измерительной схемы, диапазона изменения сигнала, поступающего на вход блока управления и возможности балансировки прибора и регулировки уровня входного сигнала; определение реакции прибора на изменение опорной и мертвой зон, длительности импульса, времени интегрирования, а также реакции прибора на команды, подаваемые с пульта дистанционного управления.
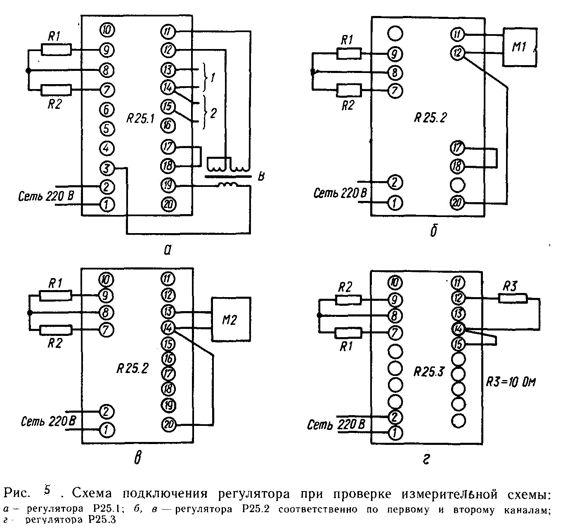
Последовательность действий при тестировании оборудования P25.1, работающего с датчиком дифференциального трансформатора. Оборудование подготовлено к тестированию. Для этого, терминал 17. 5, A) замкнуты накоротко (клеммы расположены на задней стенке корпуса оборудования), а резисторы 115 Ом, 10 Вт подключены к клеммам 7, 8 и 8, 9. Установите контроллеры в следующее положение: подключите датчик дифференциального трансформатора B к клеммам 3, 19 первичной обмотки и к клеммам 11, 12 вторичной обмотки.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Переведите кнопку 15 в положение » ⑦», нажмите ее и кнопку 13 в положение ⑦ (выдвиньте ручки потенциометра (рисунок 6, А) 8, 12, 14, 16, 19, 23, 24, 25 установите потенциометры 4 «регулировка» и 22 «корректор» на 0 (среднее положение) слева), подайте напряжение 220 ⑦ на клеммы 1. 2.
Проверьте измерительную цепь потенциометра блока ⑤1 (25) (на рисунке 6, поверните его до упора вправо и измерьте рассогласованный сигнал индикатором 21 (сигнал должен быть около 5⑦.) Если индикации нет, подойдите к гнездам Оклахоманс и Оклахоманс ( на рисунке 6, Оклахоманс 11 и 9) Подключите вольтметр Оклахоманс.
Потенциометр «корректор» (22) используется для настройки устройства, но затем потенциометры 22 и 25 возвращаются в исходное положение Эти операции могут быть выполнены для всех входов
Проверьте работу блока управления при повороте ручки индикаторы 17 и 18 гаснут при перемещении влево или вправо на 0,5% (на 0,5 деления) от положения равновесия, должно загореться меньше или больше индикаторов При этом между клеммами 7,8 и 8, 9 должно появиться постоянное напряжение 21,27 В Напряжение измеряется вольтметром в состоянии равновесия, напряжение на клеммах 7, 8 и 8, 9 не должно превышать 0,5 ⑦
Уравновесьте «эталонное» устройство потенциометра и поверните потенциометр «зона» (19) до упора вправо При таком положении потенциометра 19 индикаторы 17 и 18 должны загораться при изменении «установки» потенциометра на 2,5 деления относительно положения равновесия Проверьте работу регулятора в режиме ПИ- регулятора . Прибор настраивается «эталонным» потенциометром на среднее значение мертвой зоны Нажмите кнопку 15 (установите переключатель в положение ENDOMETRIOSE) и потенциометр endometriosis. Нажмите кнопкуp63(14) повернитесь на 5,8 делений вправо 2. 3 Разбалансируйте устройство, повернув потенциометр «настройки» на деления Одна из индикаторных ламп 17, 18 (в зависимости от направления вращения потенциометра 4 Через 10,15 секунд индикатор гаснет и через некоторое время снова загорается на 10,15 секунд Если повернуть потенциометр «импульс» (16) вправо, то длительность импульсов активации дисплея и длительность паузы должны увеличиваться с крайним правым положением потенциометра 16 при повороте потенциометра ⑦.p63(14) пауза между поворотами дисплея должна увеличиться, а нажатие клавиши 13 увеличит паузу в 10 раз.
Проверка устройства в режиме ручного управления Переключатель 7 переводится в переведенное положение при повороте клавиши 6 влево (см. индикацию увеличения регулируемой величины на рисунке 6, ⑦ или вправо (противоположная индикация), напряжение 22 … .29 ⑦ должно отображаться на клеммах 7, 8 и 8, 9.
⑥25. 2 проверка измерительной цепи блока проводится по двум каналам При проверке первого канала, на рис.: 5b. Ручки и клавиши потенциометра устанавливаются так же, как при проверке ⑥25.1 В магазине ML установлен резистор 75 Ом.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Потенциометр «Задача» (4) (рис. 6, А) устанавливается в среднее положение, а потенциометр ⑥2 (24) — в крайнее правое положение Потенциометр «Корректор» (22) уравновешивает измерительный блок (индикаторы 17, 18 гаснут Уменьшая сопротивление заряда, убедитесь, что индикатор 18 (больше) горит, а при увеличении сопротивления — индикатор 17 (минус Разница в сопротивлении, при котором загораются индикаторы 17 и 18, не должна превышать 0,4 Ом
Проверка второго канала проводится аналогично, но схема выполнена по рис. 5, Б, М2 хранит сопротивление 53,6 Ом, а вместо потенциометра К2 используется потенциометр КЗ (23) (рис. 6).
Приборы P25.3 используются при проверке в соответствии с процедурой, приведенной на рис. 5, C. Резистор R3 имеет сопротивление 100 Ом. Потенциометр и кнопка устанавливаются в подпункте P011 в том же положении, что и при проверке блоков P25.1. Задача «Потенциометр» & quot; (४) (рис. ६, A) устанавливается в крайнее левое положение. Потенциометры К (33) и МВ (32) (см. рисунок 6, б) устанавливаются в крайнее левое положение при нажатых кнопках 29, 30, 31. После подачи напряжения потенциометром, «коррекция нулевой точки» (28) для настройки устройства (дисплеи 17, 18 должны потускнеть). При повороте потенциометра 28 в крайнее левое положение должен загореться индикатор 17, а при повороте вправо — индикатор 18. Когда индикаторы на соответствующих выходных клеммах устройства (7, 8 и 8, 9) купаются. , сигнал 21. Должно быть 27 В и еще 0,5 В с негорючими индикаторами. Снимите блок с потенциометром 28. Поверните потенциометр 32 в крайнее левое положение (или ключ 31) — задача 9 … 11 милливольт. Показания дисплея 21 должны снизиться до 50 MA.
Блок контроллера проверяется аналогичным образом. у регуляторов Р25.1. Исправные регуляторы (Тем, у кого есть правильные ответы на возмущения цензоров или руководящих органов) дается указание.
Регулировка и ремонт
1. Монтаж, настройку А настройка устройства должна производиться лицами, имеющими специальную подготовку по эксплуатации электрооборудования с напряжением до 1000 В и изучившими настоящее техническое описание и инструкцию по эксплуатации.
2. сервисные функции, настройке И установка прибора должна производиться при полностью снятом напряжении.
3. корпус устройства должен быть заземлен проводом сечением не менее 4 мм и Sup2;
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
Настройка регулятора Технологический процесс включает в себя статические и динамические настройки . Статическая настройка Необходимые положения органов управления измерительных блоков включают установку регуляторов И функция поля нечувствительности.
Динамическая настройка Постоянный демпфер включает в себя выбор времени, длительности импульсов и частоты их следования. Стабильный настройка регулятора P25.1 под дифференциальным и транспортным датчиком не сложно. При заданном значении контролируемого параметра и номинальной нагрузке объекта потенциометр «работа» (4) установлен в среднее положение, а K1 находится в крайнем правом положении. Затем потенциометром «корректор» (22) настраивается блок — грубый и «рабочий».
С двумя и тремя датчиками (две или три часовни) регуляторе ) Необходимо установить определенное соотношение между параметрами в соответствии с математической моделью технологического процесса. С коэффициентом масштабирования 1 (потенциометр K1, K2, KZ, диапазон изменения входного сигнала для каждого канала измеряется справа направо). Для этого подключите вольтметр постоянного тока к гнезду E и с (11, 9) RВХ= 3.3 Cobham и шкала 0. 3 и 0. 15v, класс точности 1.5.
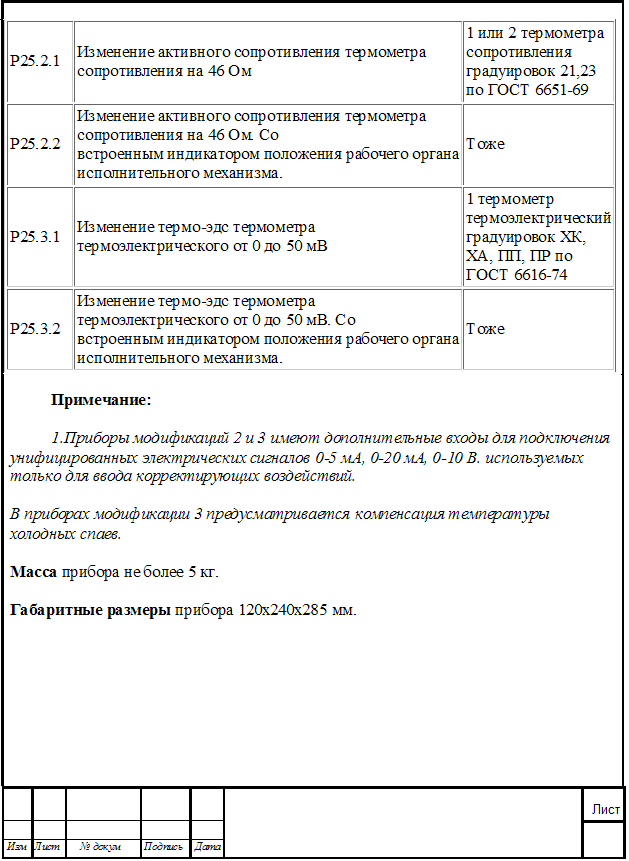
Затем потенциометрами KL, K2, KZ (24, 25, 23) устанавливаются необходимые коэффициенты масштабирования, которые рассчитываются следующим образом. Пропорции σ установлены;12=X1/X2σ13=X1/X3И уровень сигнала для каждого канала X был найден1*, X2* И X3*। Находим вышеуказанный входной сигнал x1**=X1*, X2**=X1*/σ12 , X3**=X1*/σ13। Затем найдите коэффициент k.i=Xi/Xi**Выберите наибольшее из них и уравновесьте его до единицы, т.е. до числа единиц.i* Макс. Это коэффициент масштабирования на данном канале. На других каналах коэффициент масштабирования определяется какi*=Ki/KМакс। यह तकनीक अन्य संशोधनों के लिए भी स्वीकार्य है регуляторов , например, Р25.2.
При настройке одноимпульсных регуляторов P25.2 यह ध्यान में रखा जाना चाहिए कि यदि निर्दिष्ट तापमान 30 ° C से कम है, तो कनवर्टर टर्मिनलों से जुड़ा हुआ है 13, 14, 20, 30. 150 ° C से टर्मिनलों 11, 12, 20 के तापमान पर। , टर्मिनल 12 के साथ क्रमिक रूप से 150 डिग्री सेल्सियस से अधिके तापमान पर एक रोकनेवाला, 11. 12 ओम का प्रतिरोध।
Статическая настройка регулятора P25.3 इसके स्नातक स्तर की पढ़ाई और कार्य सेट करना शामिल है। ग्रेडिंग एक निरंतर तापमान पर किया जाता है, 20 ° 2 ° C. नीचे ट्यूनिंग पैरामीटर हैं हैं регулятора थर्मामीटर के स्नातक पर निर्भर करता है।
कोल्ड स्पा का एक बॉक्स डिवाइस 12, 14, 15 (ऊपर इंगित प्रतिरोध प्रतिरोध) से जुड़ा होगा, मिलिवेट मीटर टर्मिनल 12 (+डिवाइस) और टर्मिनल 14 से जुड़ा हुआ है, और एक पोटेंशियोमीटर यू का उपयोग कर रहा हैм, एक मिलिवुमेटर पर, यू का वोल्टेज पोटेंशियोमीटर को नियंत्रित किया जाता है। फिर मिलिवोल्टमीटर टर्मिनलों 14, 11 (टर्मिनल 14 पर+ डिवाइस) पर स्विच करता है।
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
पोटेंशियोमीटर के साथ, «कार्य» (4) शून्य पर, «शून्य सुधारक» मिलिवेट मीटर के तीर को शून्य पर सेट करता है। थर्मल ट्रांसफार्मर सिग्नल का सिग्नल कॉरिएटर्स द्वारा सुचारू और असतत द्वारा बनाया गया है।
किसी दिए गए तापमान पर स्थापित करना पोटेंशियोमीटर «कार्य» को संतुलित करके किया जाता है регулятора ऑब्जेक्ट पर एक सामान्य लोड और दिए गए तापमान मूल्य के साथ।
असंवेदनशीलता क्षेत्र, डिवाइस के संशोधन की परवाह किए बिना, समायोज्य मूल्य के आधे अनुमेय विचलन के बराबर, एक प्रतिशत के रूप में व्यक्त किया गया है। असंवेदनशीलता क्षेत्र में कमी से विनियमन की गुणवत्ता में सुधार होता है, लेकिन एक्ट्यूएटर को शामिल करने की आवृत्ति में वृद्धि और यहां तक कि ऑपरेशन के स्वचालित कैलोरिंग मोड में भी वृद्धि होती है, जो अस्वीकार्य है।
Органы настройки регулятора
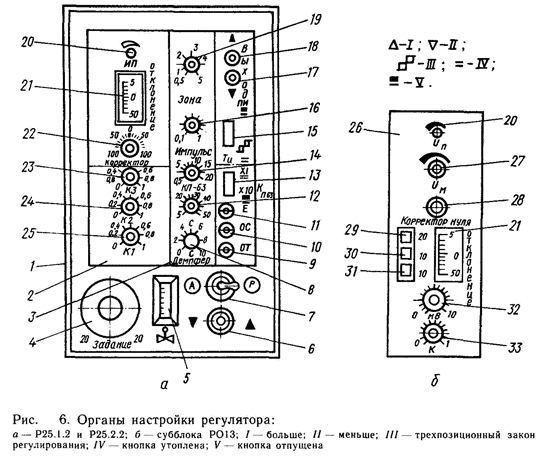
अंजीर में। 6, और फ्रंट पैनल का एक सामान्य दृश्य दिया गया है регуляторов P25.1.2 और P25.2.2, साथ ही (छवि 6, बी) सबबेलक P013 के पैनल का सामान्य दृश्य, जो किट में शामिल है регулятора Р25.3.2.
| Задачи диссертации | Лист | |||
| IZM | Лист | Нет документа | Подпись | Дата |
फ्रंट पैनल 1 पर सबबेली 2 हैं — मापने वाले P012 और 3 — नियामक रम, नियंत्रण: 4 — कोठरी (संशोधन के आधार पर एक अलग पैमाने पर); 5 — कार्यकारी तंत्र के कामकाजी निकाय की स्थिति का संकेतक (कई निष्पादन регулятора कोई संकेतक नहीं है); 7 — नियंत्रण स्विच (ए — स्वचालित, पी — मैनुअल); 6 — कार्यकारी तंत्र द्वारा मैनुअल रिमोट कंट्रोल के लिए एक स्विच (साइन I यह बताते हुए कि एक्ट्यूएटर को समायोज्य मूल्य को बढ़ाने की दिशा में चालू किया गया है — «अधिक», और साइन II दिखाते हुए कि एक्ट्यूएटर को कम करने की दिशा में चालू किया गया है समायोज्य मूल्य — «कम» — चित्र 6, ए) द्वारा दिखाए गए हैं। अन्य अंग настройки और नियंत्रण सबबेलों के पैनलों पर रखा जाता है।